Saitek Cyborg Evo
 Функциональность:
Функциональность:- 4 оси
- рычаг регулятора тяги
- 6 кнопок на основании
- 3 кнопки на поворотной планке на рукоятке 2 неподвижные
- курок
 - 8-х позиционный переключатель видов
- 8-х позиционный переключатель видов- вращающаяся рукоятка
- подходит для правшей и левшей
- рукоятка регулируется под размер руки
- регулируется головка рукоятки
- подключение USB
«Из коробки на стол».
Достаем из коробки. Сама упаковка изобилует надписями в стиле «best controller of the world» и т.п. и привлекает вас цветами и дизайном. Внутри коробки находится сам джойстик, руководство пользователя на английском и русских языках, а так же диск с ПО и Драйверами к джойстику.

Установка джойстика и драйверов.
Диск содержит в себе не только драйвера к контроллеру, но и необходимое программное обеспечение, которое позволяет запрограммировать кнопки на любые комбинации клавиатуры. Причем во время установки, программа инсталляции спросит вас, ставить ли это программное обеспечение или нет при помощи двух кнопок “Typical User” или “Advanced User”, соответственно при выборе варианта “Advanced User” оно будет установлено, а если “Typical User” то будут установлены только дрова для джойстика, т.е. без возможности программирования.
При программировании у кнопок есть три режима работы клавиш, это основной и два «шифт» режима (т.к. две кнопки шифт на основании). Смысл «шифт» кнопок в том, что при их нажатии в комбинации с другой кнопкой, эта кнопка сможет выполнять дополнительную функцию, т.е. отличную от той, что запрограммирована на ней в обычном режиме.
Так же вы можете подключить джойстик «как есть» потому как он является Plug`n`Play устройством и операционная система распознает его как стандартный джойстик со всеми его кнопками и осями.
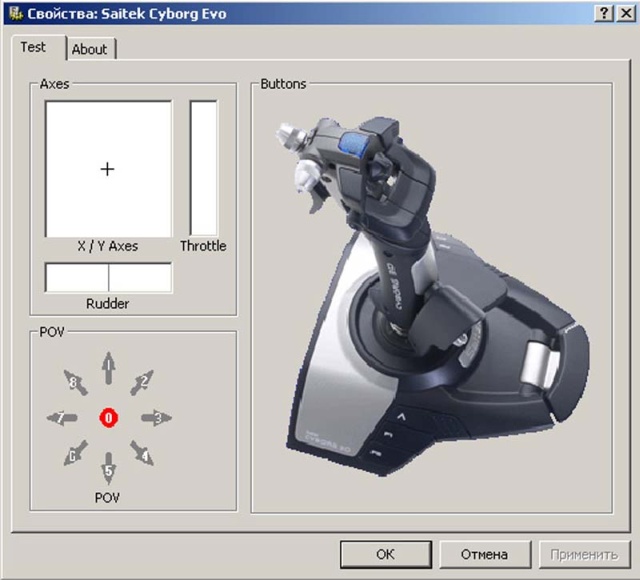
Окошко свойства джойстика, после установки драйверов:
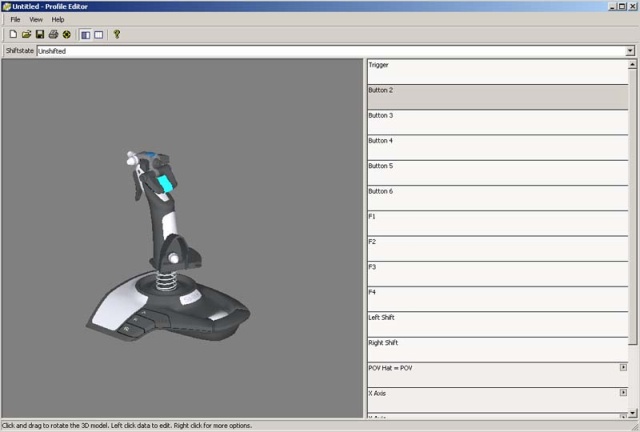
Редактор программирования (Profile Editor) представляет из себя окно-интерфейс, в котором выбирая кнопки джойстика вы назначаете им нужные вам функции клавиш клавиатуры или их комбинаций. Подробную русскоязычную инструкцию по пользованию данным программатором вы можете скачать по данной ссылке.
Внешний вид окошка программы для написания профайлов:
Дизайн, расположение кнопок и разрешение осей.
Инженеры Saitek известны своим новаторством и вводом на рынок необычных новинок, особенно дизайнерских. И в данном случае они не подвели.
Ставший уже традиционным в серии Cyborg принцип – и для правшей и для левшей, хотя, по правде говоря и не лишенный недостатка, главный из которых – это недоступность второй пары кнопок при выборе одного из вариантов использования ручки (для правшей или для левшей), потому как кнопки расположены двумя группами по три слева и справа. Более удобный, перенесенный в заднюю часть корпуса рычаг газа. Большое количество кнопок непосредственно на ручке (6 штук). Опять же – регулировка высоты опорной площадки под ладонь при помощи винта. И самое интересное нововведение – это регулировка наклона верхней части при помощи встроенных винтов Архимеда, при вращении которых вы сможете менять положение верхней части в двух плоскостях.
Разрешение осей.
На джойстике, как описано выше есть три оси, это x- тангаж, y – крен, z- скольжение (руль) и педаль газа. Для просмотра количества дискретных положений, которые выдает контроллер джойстика, воспользуемся программкой DXTweak2 (скачать её можно тут).
«нулевое и максимальное положение»:
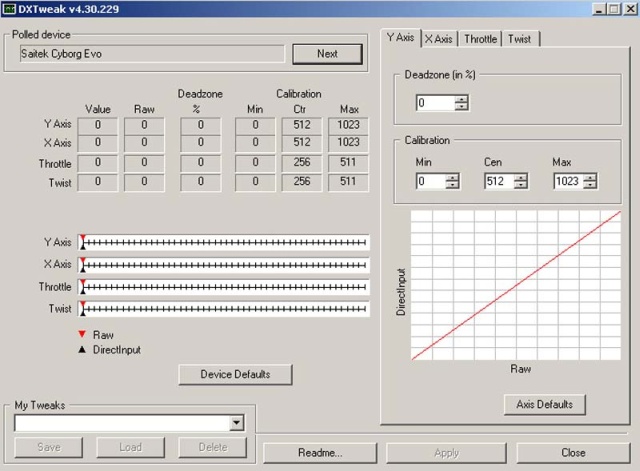

Из вышеприведенных скриншотов, видно, что по осям x и y – 1023 дискретных положения, а по осям z (руль поворота – twist) и газ (throttle) – 511 дискретных положений.
Итого.
Неплохой джойстик, но к сожалению не лишенный своих недостатков.
По сравнению со старым Cyborg Gold немного упавшее качество, причем фактически он стал менее надежным из-за повышения сложности конструкции. Например, это сложный поворотный механизм верхней части, сложная форма двух верхних кнопок, которые при повышенной нагрузке иногда заедают. Так же, мне кажется, что толщина рукоятки стала менее удобной – она стала тоньше. Сама рукоятка стала короче, т.е. при определенном положении опорной площадки под ладонь, верхняя часть ладони попадает в щель между самой ручкой и верхней поворотной частью. Еще по опыту и в сравнении со старой моделью – снизилась надежность резисторов – значительно раньше стало появляться «дрожание» по осям.
Но, если говорить о достоинствах, то их несомненно больше чем недостатков.
К достоинствам можно отнести повышенную точность (дискретность положений) по осям, более удобное расположение кнопок на основании, более удобное расположение рычага газа, значительно более удобная хатка и две дополнительные кнопки на ручке. Так же немного увеличился ход ручки.
В целом – хороший выбор по нормальной цене, которая в день написания данной статьи (8.10.2004) составляла 1750 руб. в Москве.
Описание конструкции.
Поворотная верхняя часть позволяет при помощи двух винтов со спиральной резьбой (винт Архимеда) регулировать наклон планки с тремя кнопками в вертикальной плоскости и непосредственной всей верхней части (5 кнопок хатка) в горизонтальной плоскости (наклон). Верхняя часть джойстика в крайних положениях,
- в вертикальных:


- и горизонтальных (наклон):


Джойстик может быть использован как правшами, так и левшами. Сделать это позволяет перекидная планка, которая при помощи винта крепится непосредственно к ручке. Так же, есть возможность переставлять опору под ладонь по высоте, т.к. отверстий несколько и на разной высоте.



Отверстия для регулирующего винта и переставные планки с самим винтом:


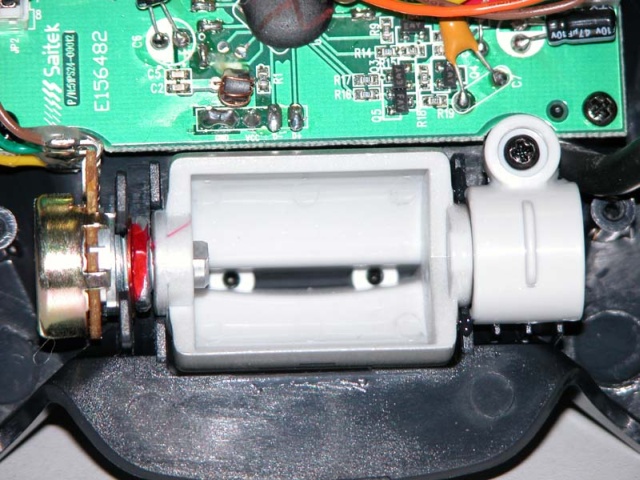
Загрузка ручки осуществляется при помощи упорной шайбы с отверстием, которая скользит по штифту ручки, при этом загрузочная пружина упирается в нижнюю часть ручки и непосредственно в пружину. Соответственно при отклонении ручки – создается центрирующее усилие:

Крайние положения рукоятки по X и Y осям,
Х (тангаж):


Y (крен):


Рычаг газа в крайних положениях:


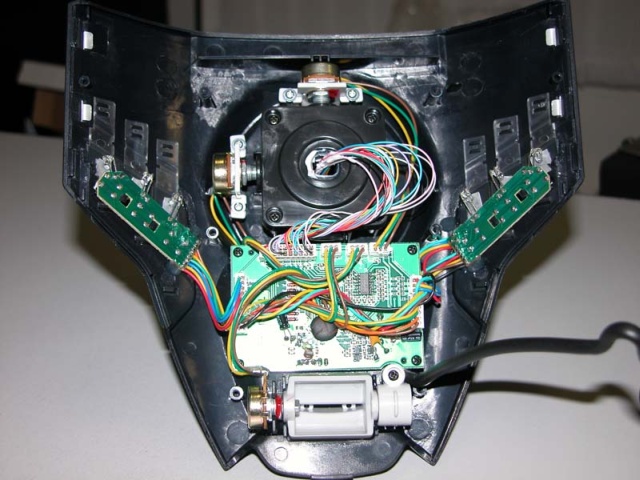
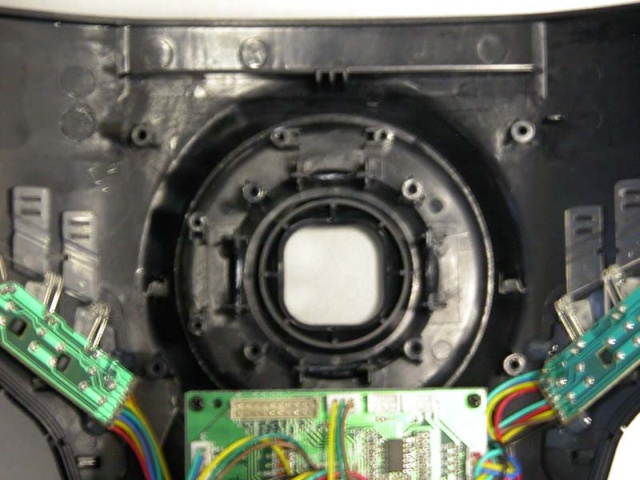
Вид основания снизу:

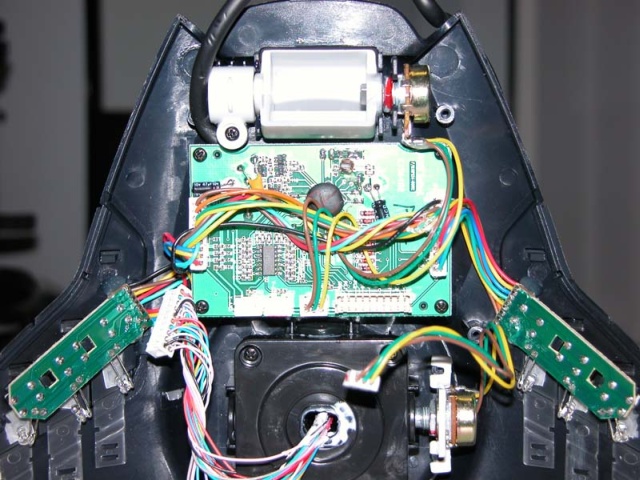
Само основание состоит из двух половинок, которые между собой крепятся 6-ю шурупами. Внутри находится электроплата к которой на разъемах подключаются все составные части джойстика, такие как разъем рукоятки и разъемы на которых висят резисторы, сам USB шнур распаян непосредственно на плату и не отделяется:

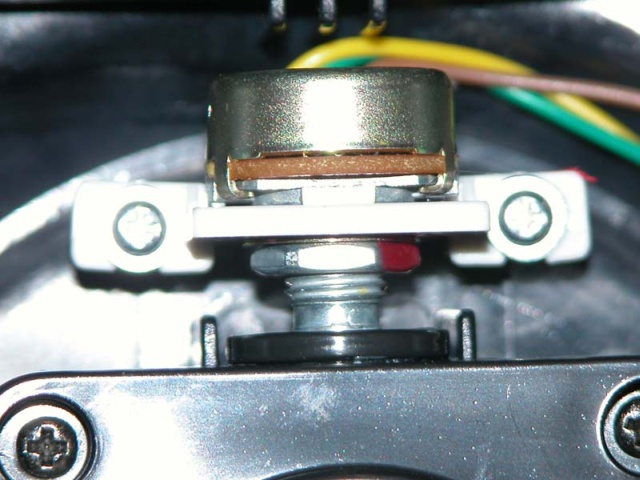
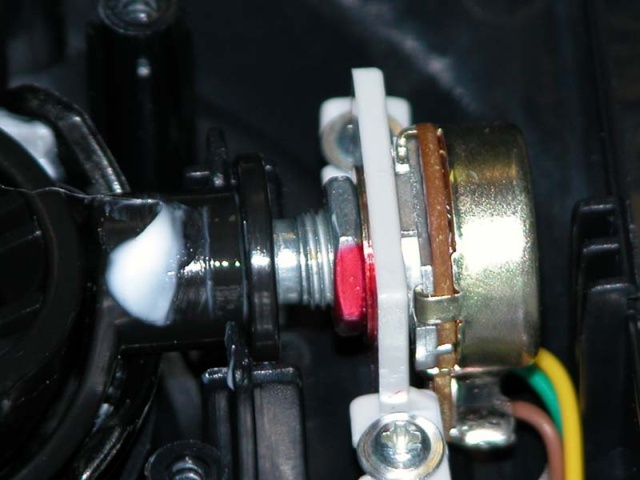
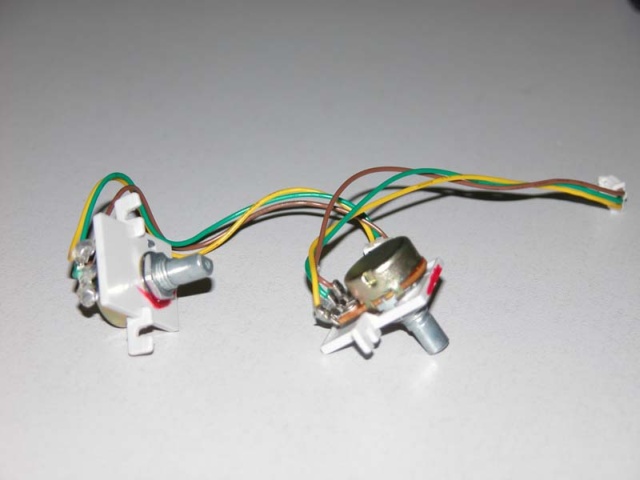
Установка резисторов крена, тангажа и рычага газа:

Для того, чтобы получить доступ непосредственно к механизму качения ручки и его мелким деталям (для более детального фотографирования), нам сначала придется разобрать и отделить рукоятку от основания.
Конструкция рукоятки сделана таким образом, что для того, чтобы разделить половинки ручки, сначала придется снять поворотную планку с кнопками и соответственно сами кнопки. Кнопки к планке крепятся на защелках, причем чтобы снять боковые кнопки без повреждений, сначала снимаем центральную кнопку.
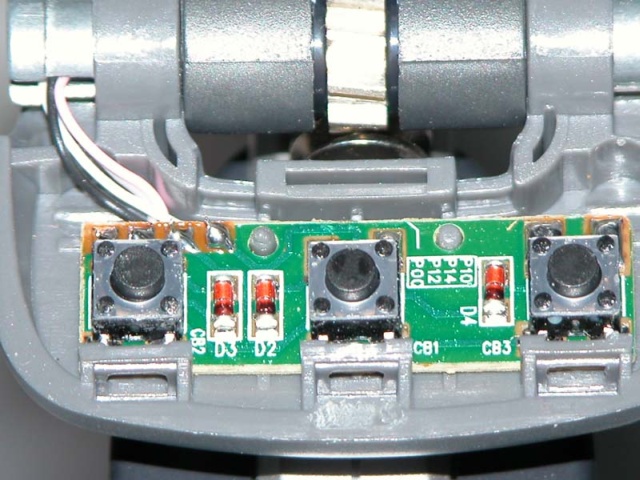
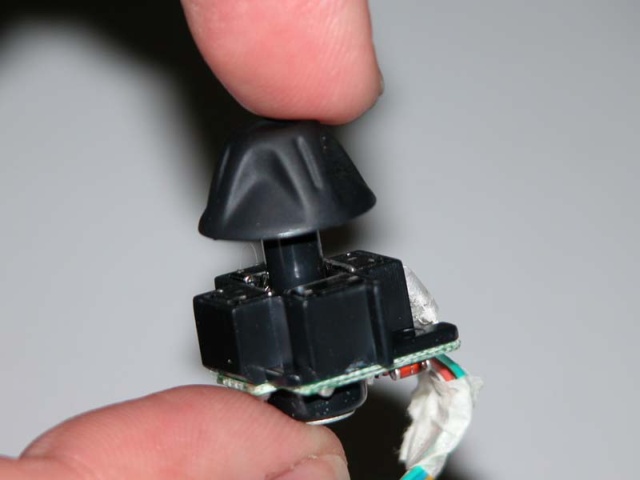
Снятые кнопки (внешние крышки) и находящиеся под ними кнопки:

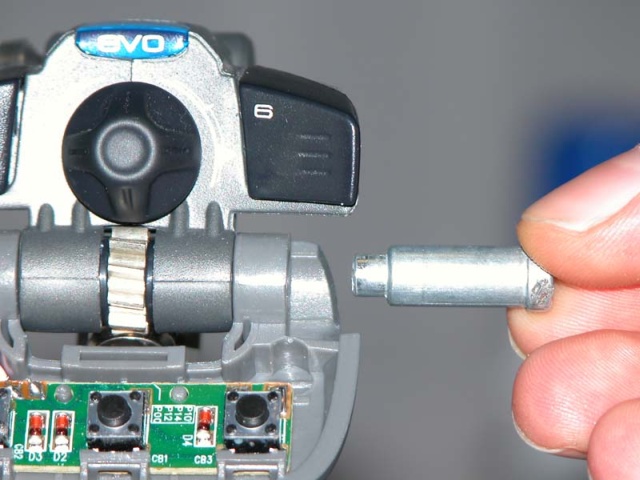
Поворотная планка закреплена при помощи двух штифтов законтренных в шестерне, которая двигает данную планку в вертикальном положении. Сами штифты очень крепко «сидят» (буквально вбиты) в эту полую шестерню, поэтому при разборке будьте предельно осторожны, чтоб не повредить джойстик.
Правый штифт, место его крепления и крупный вид штифта:


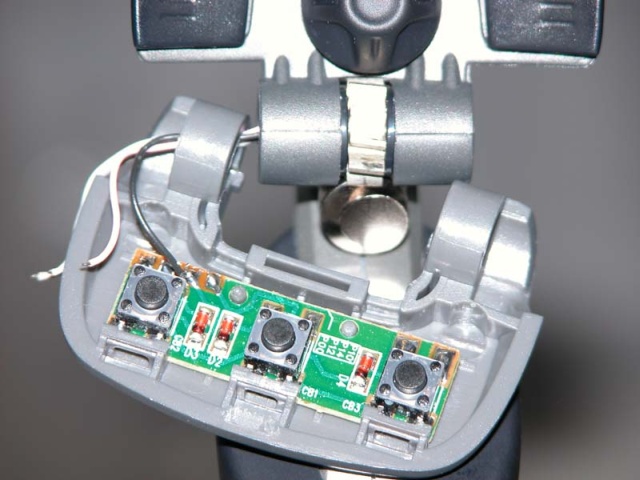
Вид с обоими снятыми штифтами и почти снятой планкой, планка отдельно:


Крупные детали верхней части ручки:


Снятие двух верхних кнопок и декоративной крышки над светодиодом:


Ручка состоит из двух половинок которые скреплены шурупами.
Шестерня, которая отвечает за поворот планки с кнопками:

Внутри ручки находится резистор, которые выполняет роль оси скольжения (раддер):
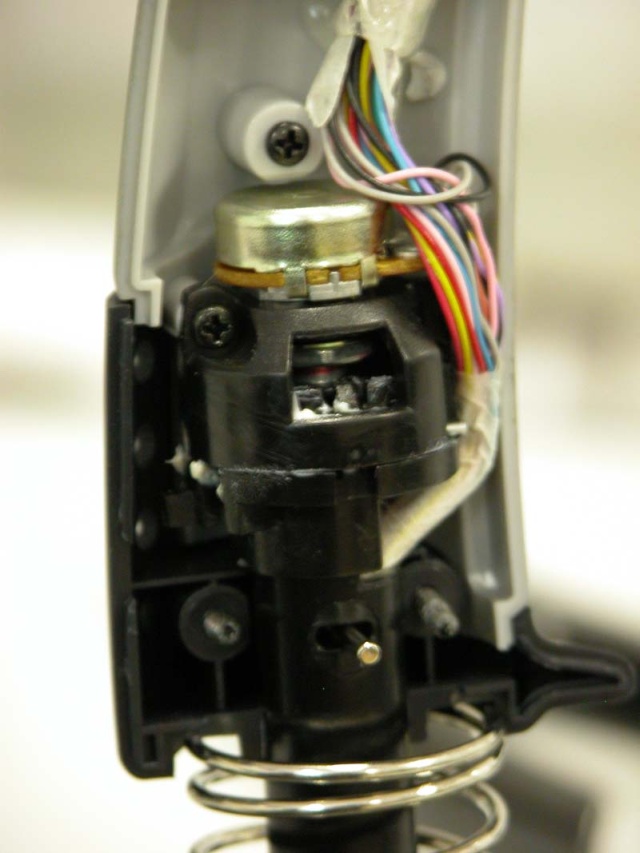
Причем на этом снимке видна шпилька, которой закреплена ручка (она вдета сквозь отверстие в штоке).
Сам резистор прикручен к гильзе, которая состоит из двух частей одна из которых вдета в окончание штока ручки, а другая неподвижно прикручена шурупами к ручке. Загрузка осуществляется пружиной, которая разжимается при повороте частей гильзы относительно друг друга:



Общий план деталей в ручке, блок кнопок переключателя видов (хатка), один из двух винтов (при помощи которых двигается верхняя часть ручки):


Итак, вернемся обратно к деталям основания джойстика.
Карданный механизм прикрыт общей крышкой квадратной формы, которая прикручена к коробке на шурупах, под которой находится карданный механизм подвески ручки:

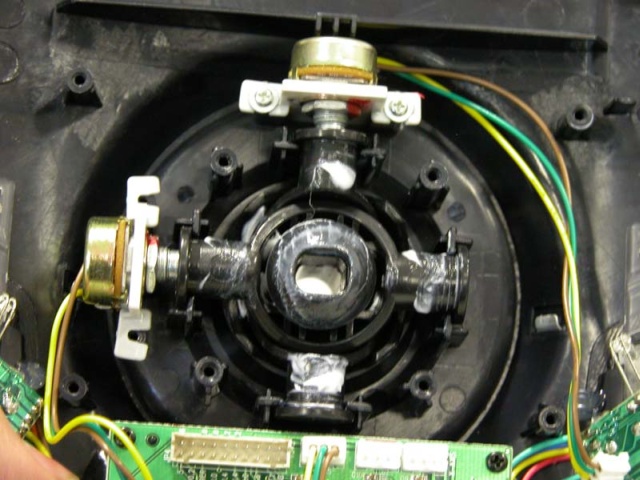
Резисторы крена и тангажа:
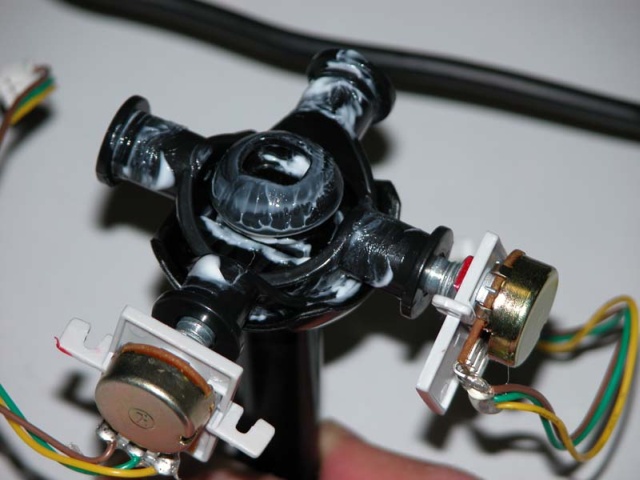
Сам механизм подвески выполнен в виде трех полусфер, одна из которых единое целое со штоком, а две других, одна меньшего диаметра другая большего, переходят в оси, в которые в свою очередь вставлены оси резисторов. На конце штока (после сферы) какрепляется полукруглая заглушка, при помощи которой вся конструкция упирается в нижнюю часть крышки:





Верхняя часть основания со снятой механикой и шайба, которая движется по штоку:


Пружина загрузки ручки в максимально сжатом/разжатом состояниях и вид крепления ручки сверху со снятой пружиной:


